
Seria SCARA
Poznaj naszą serię SCARA
Nasza rodzina 4-osiowych robotów SCARA obejmuje modele o udźwigu do 20 kg i zasięgu do 1100 mm. Dedykowane modele wyposażone są w białą powłokę epoksydową, ochronę IP54, smar spożywczy klasy NSF-H1 oraz śruby antykorozyjne, co czyni je idealnym wyborem do zastosowań w branży spożywczej i w pomieszczeniach czystych.

Odkryj nasze modele SCARA

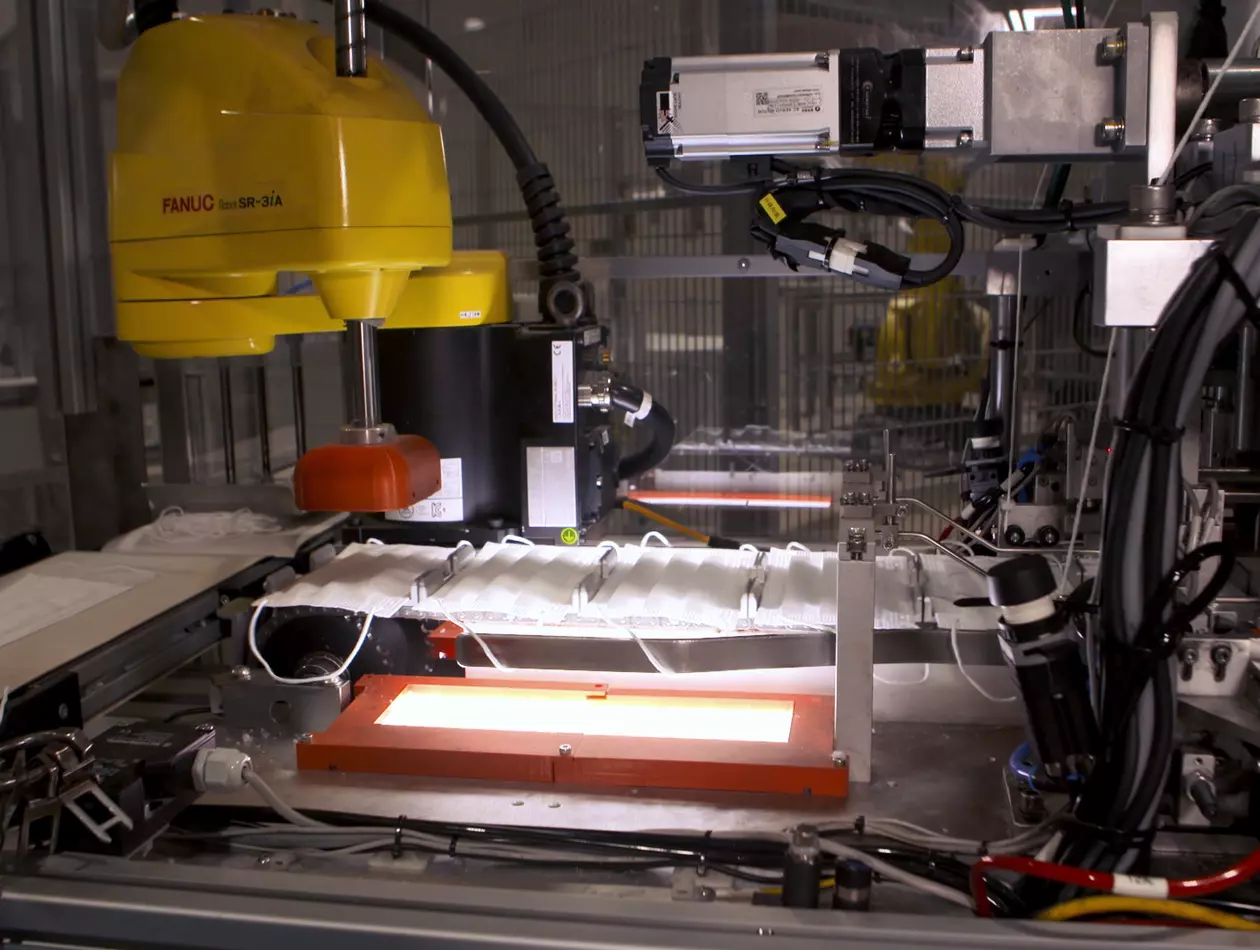
SR-3𝑖A

SR-6𝑖A

SR-12𝑖A

SR-20𝑖A

SR-3𝑖A Food/Clean

SR-6𝑖A/C Food/Clean

SR-12𝑖A/C Food/Clean

SR-3𝑖A/U
Korzyści dla Twojej firmy
Szeroki zakres modeli
Nieskończone możliwości zastosowań
Zmaksymalizowana wydajność
Intuicyjne programowanie
Łatwa integracja
Wersje dedykowane do specyficznych środowisk
Specjalista ds. zastosowań spożywczych
Czerp inspirację z sukcesów innych
Roboty FANUC pomagają producentowi maseczek stawić czoła wyzwaniu
Gdy popyt na produkcję gwałtownie rośnie w krótkim czasie, roboty i automatyzacja mogą pomóc w spełnieniu wymagań znacznie szybciej, niż wielu zdaje sobie z tego sprawę. Jednakże wynik ten w dużej mierze zależy od wyboru robotów, które są łatwe w instalacji, programowaniu i uruchomieniu.

Placing Plastic Injection-Moulding into Packing Trays
Because manufacturers everywhere face shortages of skilled labor, and as a company dedicated to excellence, Kunstoff-Packungen continuously seeks ways to improve its level of automation.

Loading & Unloading, Flex Feeding, and Inspection in a Single Cell
Vernay is globally renowned for flow control solutions, producing over a billion rubber valve components annually across Asia, the Americas, and Europe. Their critical products, used in devices like respirators and EV battery systems, must meet the highest quality standards with zero defects.
Idealne dopasowanie do Twojej aplikacji

Montaż
Kontrola wizyjna

Obsługa materiałów
Rozwiązania dostosowane do potrzeb Twojej branży

Robotyzacja i automatyzacja dla branży lotniczej

Robotyzacja i automatyzacja dla branży motoryzacyjnej

Pojazdy elektryczne
Przemysł elektroniczny

Żywność i napoje

Robotyzacja i automatyzacja dla branży medycznej
