
Seria SCARA
Faceți cunoștință cu seria noastră SCARA
Familia noastră de roboți SCARA cu 4 axe include modele cu sarcini utile de până la 20 kg și o rază de acțiune de până la 1.100 mm. Modelele dedicate vin cu o acoperire epoxidică albă, IP54, vaselină de uz alimentar NSF-H1 și șuruburi anti-rugină, ceea ce le face o alegere ideală pentru aplicații alimentare și în camere curate.

Descoperiți modelele noastre SCARA

SR-3𝑖A

SR-6𝑖A

SR-12𝑖A

SR-20𝑖A

SR-3𝑖A/C Alimente/Curățenie

SR-6𝑖A/C Alimente/Curățenie

SR-12𝑖A/C Alimente/Curățenie

SR-3𝑖A/U
Beneficii pentru afacerea dvs.
Gamă largă de modele
Posibilități infinite de aplicare
Producție maximizată
Programare intuitivă
Integrare ușoară
Versiuni dedicate mediului
Specialist în aplicații alimentare
Inspirați-vă din succesul altora
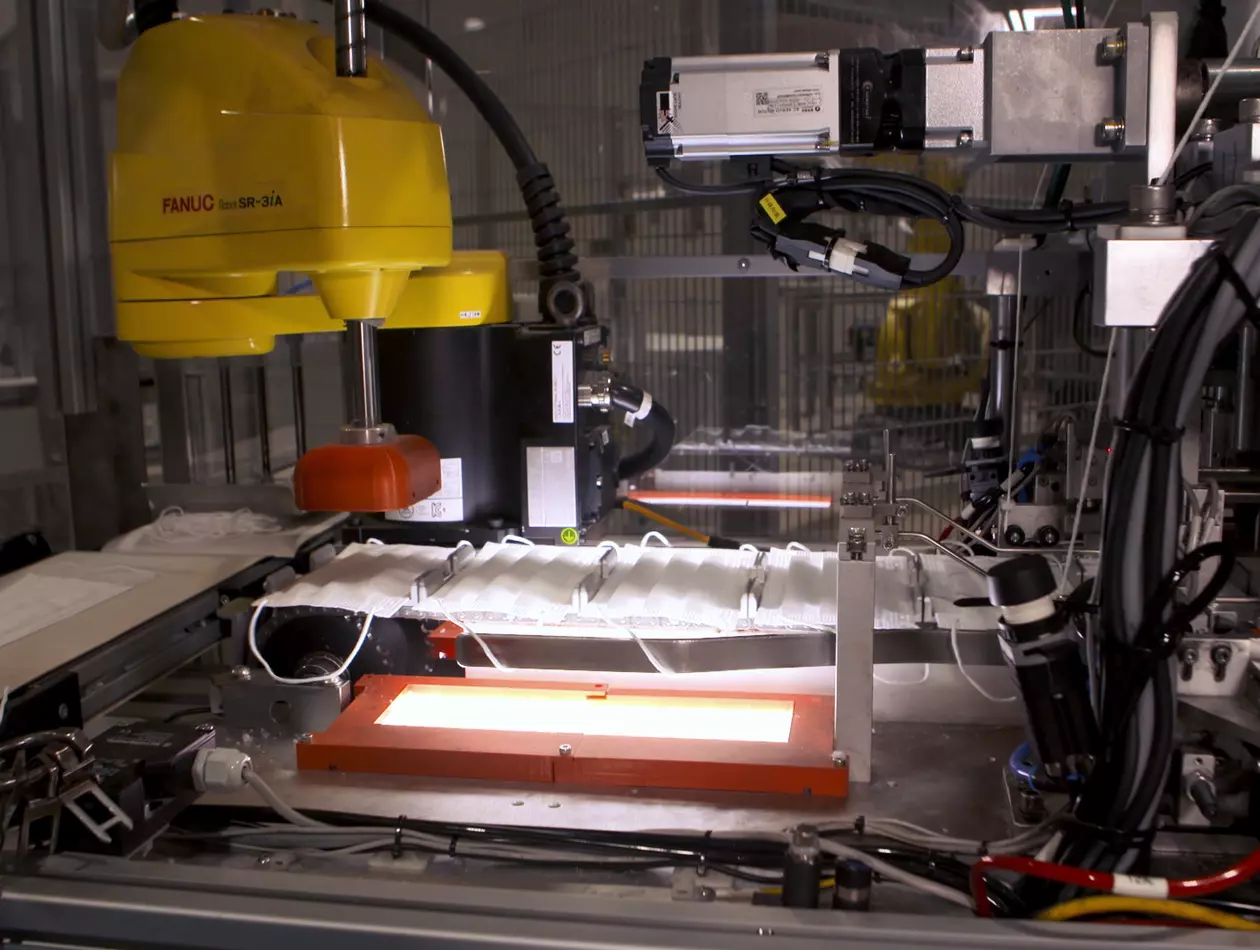
Roboții FANUC ajută producătorul de măști să facă față provocării
Atunci când cererea de producție se accelerează dramatic într-un interval scurt de timp, robotica și automatizarea pot ajuta la îndeplinirea cerințelor mult mai rapid decât își dau seama mulți. Cu toate acestea, acest rezultat depinde în mare măsură de selectarea roboților care sunt ușor de instalat, programat și pus în funcțiune.

Placing Plastic Injection-Moulding into Packing Trays
Because manufacturers everywhere face shortages of skilled labor, and as a company dedicated to excellence, Kunstoff-Packungen continuously seeks ways to improve its level of automation.

Loading & Unloading, Flex Feeding, and Inspection in a Single Cell
Vernay is globally renowned for flow control solutions, producing over a billion rubber valve components annually across Asia, the Americas, and Europe. Their critical products, used in devices like respirators and EV battery systems, must meet the highest quality standards with zero defects.
Potrivire perfectă pentru aplicația dvs.

Asamblare
Inspecția vizuală robotică

Manipularea materialelor
Soluții personalizate pentru industria dvs.

Robotică și automatizare pentru industria aerospațială

Robotică și automatizare pentru industria auto

Vehicule electrice
Electronică

Alimente și băuturi

Robotică și automatizare pentru industria medicală
