
SCARA Series
Découvrez notre SCARA series
Notre famille de robots SCARA à 4 axes comprend des modèles avec des charges utiles allant jusqu'à 20 kg et une portée allant jusqu'à 1 100 mm. Les modèles dédiés sont dotés d'un revêtement époxy blanc, d'un indice de protection IP54, d'une graisse alimentaire NSF-H1 et de boulons antirouille, ce qui en fait un choix idéal pour les applications alimentaires et les salles blanches.

Découvrez nos modèles SCARA

SR-3𝑖A

SR-6𝑖A

SR-12𝑖A

SR-20𝑖A

SR-3𝑖A/C Food/Clean

SR-6𝑖A/C Food/Clean

SR-12𝑖A/C Food/Clean

SR-3𝑖A/U
Avantages pour votre entreprise
Large gamme de modèles
Des possibilités d'application infinies
Débit maximisé
Programmation intuitive
Intégration facile
Versions environnementales dédiées
Spécialiste des applications alimentaires
S'inspirer de la réussite des autres
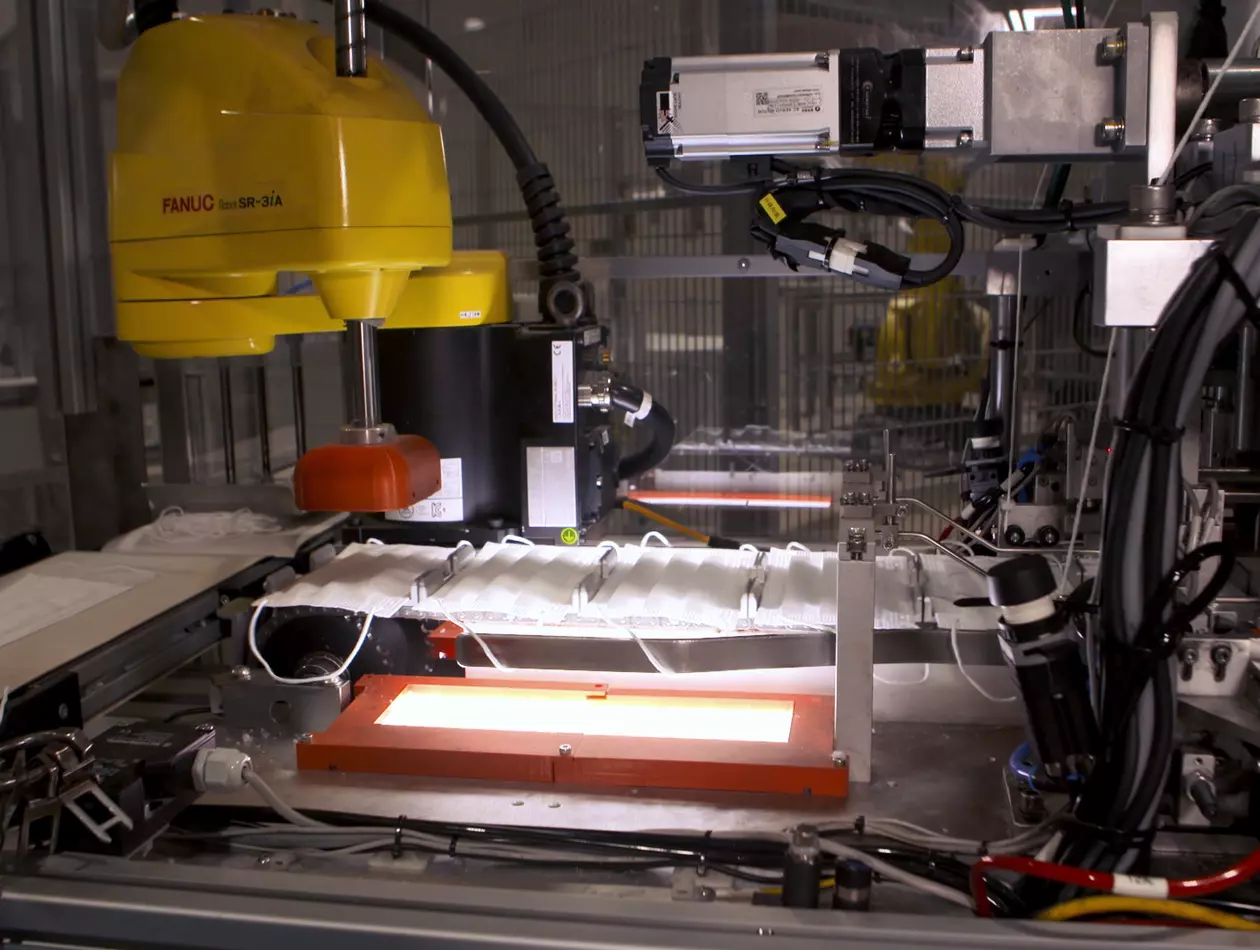
Les robots FANUC aident le producteur de masques à relever le défi
Lorsque la demande de production s'accélère considérablement dans un court laps de temps, les robots et l'automatisation peuvent aider à répondre aux exigences beaucoup plus rapidement que beaucoup ne le pensent. Toutefois, ce résultat dépend fortement de la sélection de robots faciles à installer, à programmer et à mettre en service.

Placing Plastic Injection-Moulding into Packing Trays
Because manufacturers everywhere face shortages of skilled labor, and as a company dedicated to excellence, Kunstoff-Packungen continuously seeks ways to improve its level of automation.

Loading & Unloading, Flex Feeding, and Inspection in a Single Cell
Vernay is globally renowned for flow control solutions, producing over a billion rubber valve components annually across Asia, the Americas, and Europe. Their critical products, used in devices like respirators and EV battery systems, must meet the highest quality standards with zero defects.
Une adaptation parfaite à votre application

Assemblage
Inspection de la vision

Manutention
Des solutions sur mesure pour votre secteur d'activité

Robotique et automatisation pour l'industrie aérospatiale

Robotique et automatisation pour l'industrie automobile

Véhicules électriques
Électronique

Agroalimentaire

Robotique et automatisation pour l'industrie médicale
