
Série SCARA
Conheça a nossa série SCARA
A nossa família de robôs SCARA de 4 eixos inclui modelos com cargas úteis de até 20 kg e um alcance de até 1100 mm. Os modelos dedicados são fornecidos com um revestimento em epóxi branco, IP54, massa lubrificante de qualidade alimentar NSF-H1 e parafusos anti-ferrugem, o que os torna a escolha ideal para aplicações alimentares e em salas limpas.

Descubra os nossos modelos SCARA

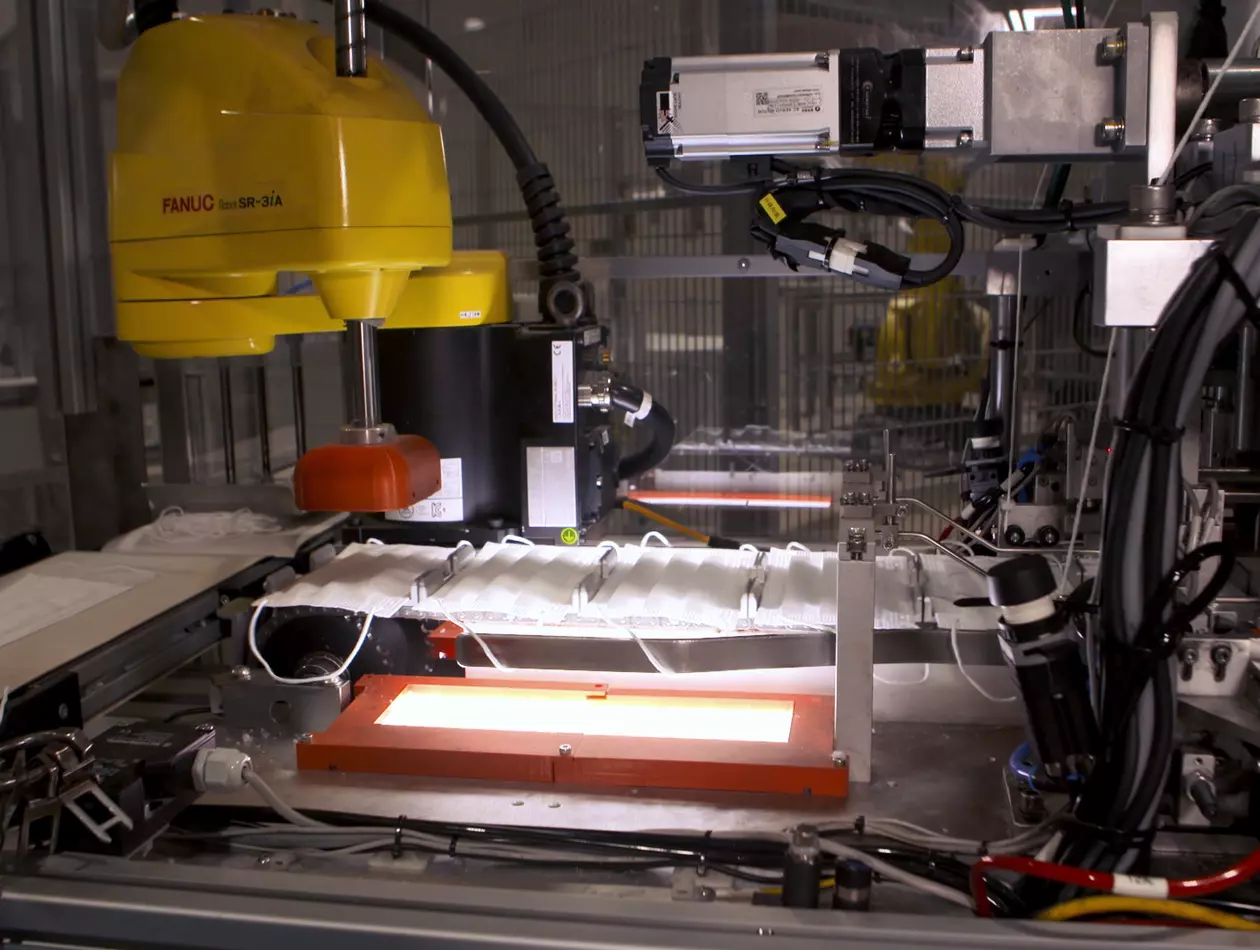
SR-3𝑖A

SR-6𝑖A

SR-12𝑖A

SR-20𝑖A

SR-3𝑖A/C Alimentos/Limpeza

SR-6𝑖A/C Alimentos/Limpeza

SR-12𝑖A/C Alimentos/Limpeza

SR-3𝑖A/U
Vantagens para a sua empresa
Vasta gama de modelos
Possibilidades de aplicação infinitas
Rendimento maximizado
Programação intuitiva
Integração fácil
Versões ambientais dedicadas
Especialista em aplicações alimentares
Inspire-se no sucesso dos outros
Os robôs da FANUC ajudam o produtor de máscaras a enfrentar um desafio
Quando a procura de produção aumenta drasticamente num curto espaço de tempo, os robôs e a automação podem ajudar a satisfazer os requisitos muito mais rapidamente do que muitos imaginam. No entanto, este resultado depende muito da seleção de robôs que sejam fáceis de instalar, programar e colocar em funcionamento.

Placing Plastic Injection-Moulding into Packing Trays
Because manufacturers everywhere face shortages of skilled labor, and as a company dedicated to excellence, Kunstoff-Packungen continuously seeks ways to improve its level of automation.

Loading & Unloading, Flex Feeding, and Inspection in a Single Cell
Vernay is globally renowned for flow control solutions, producing over a billion rubber valve components annually across Asia, the Americas, and Europe. Their critical products, used in devices like respirators and EV battery systems, must meet the highest quality standards with zero defects.
Solução perfeita para a sua aplicação

Montagem
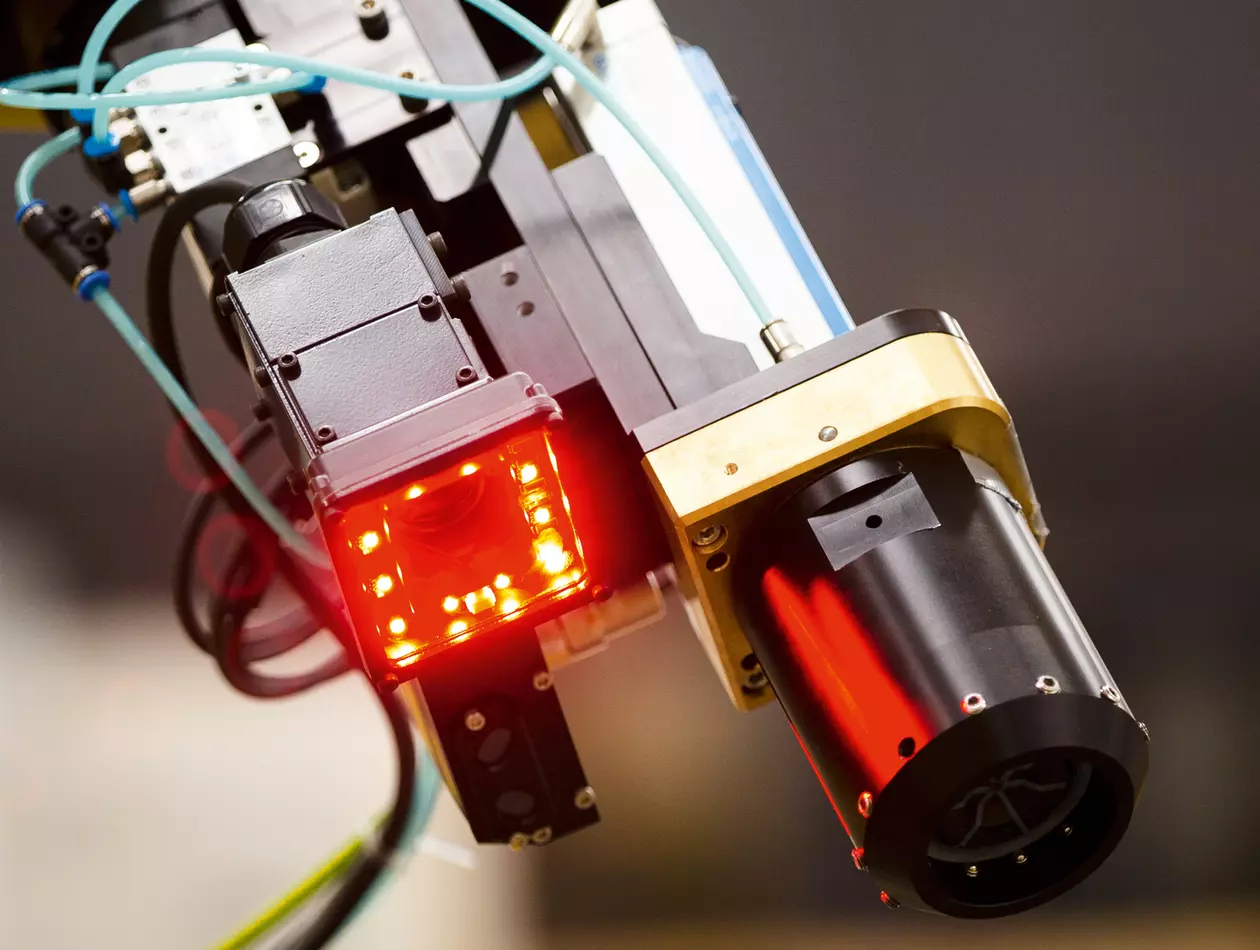
Sistemas de Inspeção Visual

Manipulação de materiais
Soluções à medida para o seu sector

Robótica e automação para a indústria aeroespacial

Robótica e Automação para a Indústria Automóvel

Veículos eléctricos
Eletrónica

Alimentação e bebidas

Robótica e automação para a indústria médica
