
SCARA-Serie
Lernen Sie unsere SCARA-Serie kennen
Unsere Familie von 4-Achsen SCARA Robotern umfasst Modelle mit Traglasten von bis zu 20 kg und einer Reichweite von bis zu 1.100 mm. Dedizierte Modelle sind mit einer weißen Epoxidbeschichtung, IP54, lebensmittelechtem NSF-H1-Fett und rostfreien Schrauben ausgestattet, was sie zu einer idealen Wahl für Lebensmittel- und Reinraumanwendungen macht.

Entdecken Sie unsere SCARA-Modelle

SR-3𝑖A

SR-6𝑖A

SR-12𝑖A

SR-20𝑖A

SR-3𝑖A/U
Entdecken Sie unsere SCARA-Modelle für Lebensmittel und Reinräume

SR-3𝑖A/C Food/Clean

SR-6𝑖A/C Food/Clean

SR-12𝑖A/C Food/Clean
Vorteile für Ihr Unternehmen
Breite Palette an Modellen
Unendliche Anwendungsmöglichkeiten
Maximierung des Durchsatzes
Intuitive Programmierung
Einfache Integration
Dedizierte Umweltversionen
Spezialist für Lebensmittelanwendungen
Lassen Sie sich vom Erfolg anderer inspirieren
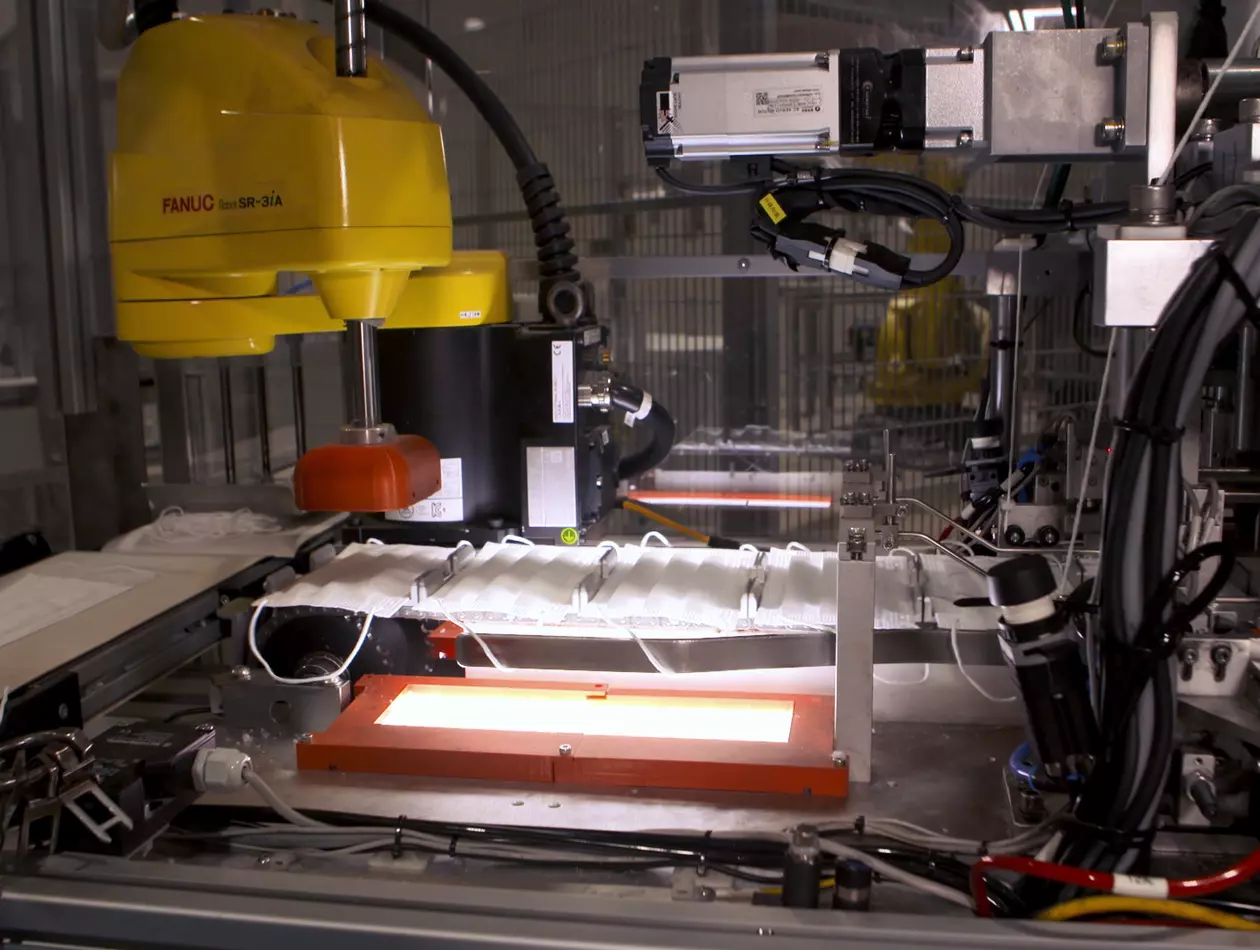
FANUC Roboter helfen Maskenhersteller, sich der Herausforderung zu stellen
Wenn die Produktionsnachfrage in kurzer Zeit dramatisch ansteigt, können Roboter und Automatisierung dazu beitragen, die Anforderungen viel schneller zu erfüllen, als viele denken. Allerdings hängt dieses Ergebnis stark von der Auswahl von Robotern ab, die einfach zu installieren, zu programmieren und in Betrieb zu nehmen sind.

Placing Plastic Injection-Moulding into Packing Trays
Because manufacturers everywhere face shortages of skilled labor, and as a company dedicated to excellence, Kunstoff-Packungen continuously seeks ways to improve its level of automation.

Loading & Unloading, Flex Feeding, and Inspection in a Single Cell
Vernay is globally renowned for flow control solutions, producing over a billion rubber valve components annually across Asia, the Americas, and Europe. Their critical products, used in devices like respirators and EV battery systems, must meet the highest quality standards with zero defects.
Perfekte Lösung für Ihre Anwendung

Zusammenbau
Vision Inspektion

Materialhandhabung
Maßgeschneiderte Lösungen für Ihre Branche

Robotik und Automatisierung für die Luft- und Raumfahrtindustrie

Robotik und Automatisierung für die Automobilindustrie

Elektrisch betriebene Fahrzeuge
Elektronik

Lebensmittel

Robotics & Automation for the Medical Industry
