ROBOTER Neue Technologie: Offene Plattformen & Physikalische KI

FANUC setzt sich stark für offene Plattformen ein, um die Automatisierung durch die Anwendung von KI-Fortschritten bei Robotern zu beschleunigen. Als Teil dieser Initiative freuen wir uns, bekannt zu geben, dass wir einen speziellen Treiber für die Steuerung von FANUC Robotern auf der Open-Source-Roboterentwicklungsplattform "ROS 2" als Open-Source-Software auf GitHub, der weltweit größten Entwicklungsplattform für die Speicherung, den Austausch und die Verwaltung von Quellcode, veröffentlicht haben. Unsere Roboter unterstützen außerdem standardmäßig die in der KI-Entwicklung weit verbreitete Programmiersprache "Python" und sind damit ideal für die Implementierung von Physical AI auf offenen Plattformen.
Einer der Vorteile einer offenen Plattform ist die Möglichkeit, Rechenressourcen aus der Cloud (Rechenzentren) und Edge-Servern, die über Hochgeschwindigkeitskommunikation der nächsten Generation verbunden sind, flexibel zu nutzen.
Viele Unternehmen, Startups, Universitäten und Forschungseinrichtungen erforschen Physical AI mit ROS und Python. Die Unterstützung einer offenen Plattform durch die Veröffentlichung des Quellcodes des ROS 2-Treibers für FANUC Roboter, die Ermöglichung der Ausführung von Python und die schnelle externe Befehlseingabe erleichtern die Einführung von Physical AI in Kombination mit hochzuverlässigen FANUC Robotern - von kleinen Robotern mit einer Traglast von 3 kg bis hin zu großen Robotern mit bis zu 2,3 Tonnen - und den neuesten KI-Technologien in Produktionsstätten.
Auf der Internationalen Roboterausstellung im Dezember dieses Jahres wird FANUC erstmals reale Beispiele für Physical AI-Anwendungen zeigen, die auf einer offenen Plattform implementiert wurden. Die Besucher können FANUC Roboter sehen, anfassen und mit ihnen sprechen, die sich tatsächlich bewegen, und so direkt erleben, wie die neuesten KI-Technologien in der Fabrikhalle eingesetzt werden können.
Hauptmerkmale des FANUC ROS 2 Treibers
Kompatibel mit dem ros2_control Framework, das hochpräzise Bewegungssteuerung in Echtzeit ermöglicht
Unterstützt Ultra-High-Speed-Steuerung mit 1 ms, einer der höchsten Standards in der Branche.
Neben den kollaborativen Robotern der CRX-Serie von FANUC können über den ROS 2-Treiber auch FANUC-Roboter, von kleinen Robotern mit einer Traglast von 3 kg bis zu großen Robotern mit bis zu 2,3 Tonnen, angeschlossen werden.
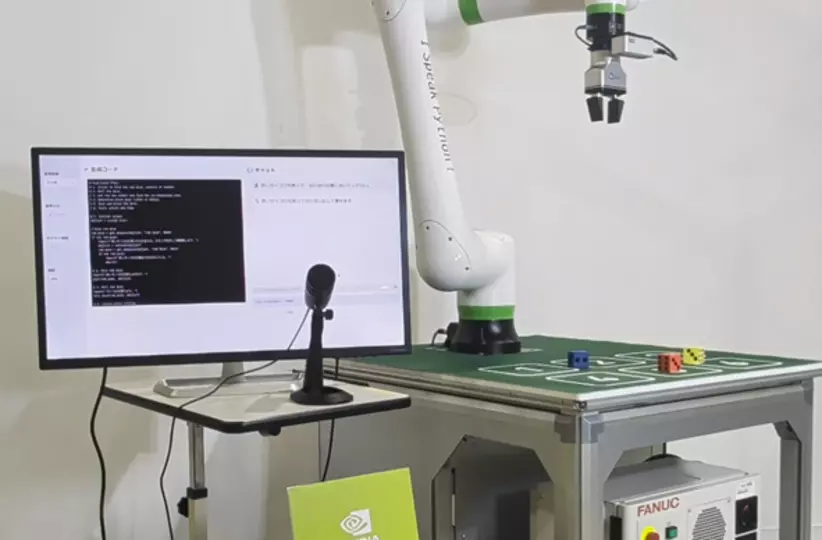
AI-Roboter erkennt Ihre Sprachbefehle

AI-Roboter, der Menschen meidet
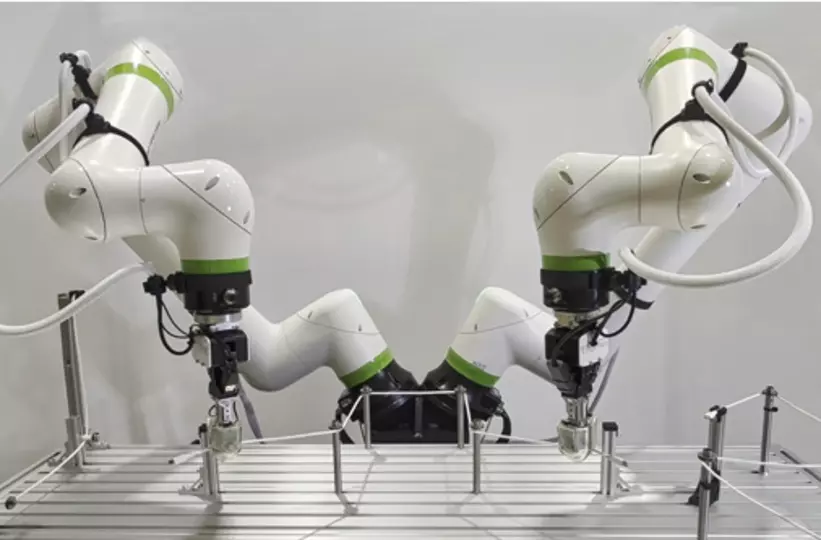
Zwei Arme installieren ein flexibles Kabel
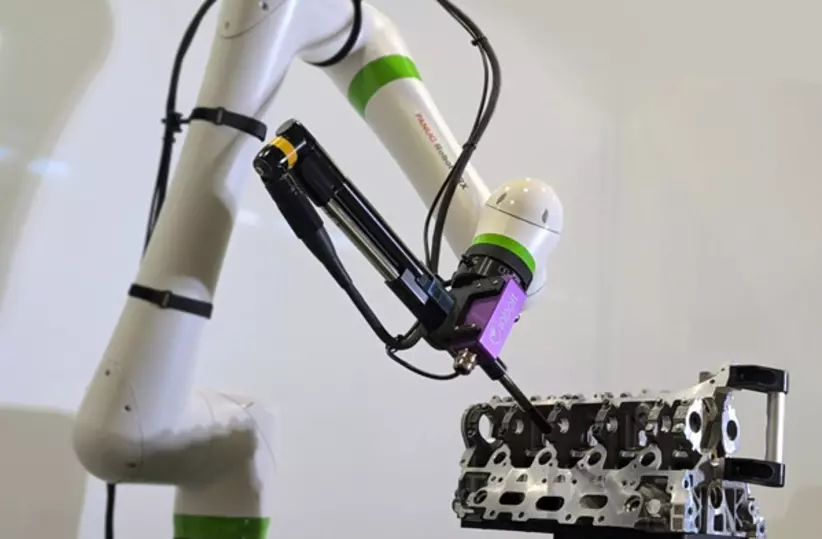
AI-Roboter verfolgt bewegliche Teile und zieht Schrauben an
Physikalische KI und digitale Zwillinge durch Zusammenarbeit mit NVIDIA vorantreiben
FANUC arbeitet mit NVIDIA zusammen, um die Implementierung von Physical AI in Industrierobotern voranzutreiben. Darüber hinaus werden FANUC Roboter einen digitalen Zwilling in einer fotorealistischen virtuellen Fabrik von NVIDIA Isaac Sim, einem Open-Source-Robotersimulations-Framework, das auf NVIDIA Omniverse-Bibliotheken aufbaut, für die Simulation realisieren.
- In den oben erwähnten physischen KI-Anwendungen von FANUC Robotern kommen der NVIDIA Jetson On-Robot-Computer und die NVIDIA KI-Infrastruktur zum Einsatz. Erleben Sie den Synergieeffekt der NVIDIA KI-Plattform in Kombination mit den Industrierobotern von FANUC auf der Internationalen Roboterausstellung.
- Neben der FANUC Collaborative Robot CRX-Serie werden FANUC Roboter, die von kleinen Robotern mit einer Traglast von 3 kg bis hin zu großen Robotern mit bis zu 2,3 Tonnen reichen, als OpenUSD SimReady Assets in Isaac Sim verfügbar sein. Entwickler von Roboteranwendungen können FANUC Roboter frei in realistischen virtuellen Fabriken platzieren, die von Omniverse-Bibliotheken angetrieben werden, um effizient KI-Lerndaten zu erfassen und zu generieren, genaue Simulationen durchzuführen und Produktionsbetriebstests durchzuführen.
- Durch die Integration der FANUC Robotersimulationssoftware ROBOGUIDE mit NVIDIA Isaac Sim ist es möglich, den realen Roboterbetrieb mit genauen Trajektorien und Zykluszeiten unter Verwendung der gleichen Algorithmen wie der tatsächliche Roboter perfekt zu reproduzieren. Auf dem Gelände der Internationalen Roboterausstellung können Sie FANUC Roboter in einer fotorealistischen virtuellen Fabrik in Betrieb sehen.

Andere Nachrichten

FANUC erweitert Partnerschaft mit WorldSkills Europe

Technologie trifft Wandel: FANUC stärkt Europas Fertigungsindustrie

Neuer FANUC Roboter mit hoher Traglast und großer Reichweite erleichtert schwere Anwendungen

EuroSkills - Europäischer Wettbewerb für junge Roboterexperten

Der neue Lebensmittel-/Reinraumroboter von FANUC verbindet Hygiene mit hoher Leistung
